





作为一种强有力的冷态冲击破碎方法, 高压水射流技术在报废固体火箭发动机中推进剂装药的清理上得到了广泛应用[1]。但在工程实际中, 固体火箭发动机水射流清理工艺仍面临着安全、效率、废水三大难题。安全性是水射流清理作业的第一要求, 为确保清理安全, 清理作业中使用的水射流压力上限、靶距下限、清理时长等工艺参数被严格限制[2-3]; 大型固体火箭发动机内有大量的推进剂装药, 要求在安全清理的前提下尽可能提高清理效率, 一般可采取提高射流压力、合理设定靶距、增大射流流量等方法; 废水中高氯酸根离子的持久污染性和难降解性[4-5]要求在清理作业中尽可能减少废水产生量, 即减少射流流量。为在水射流清理作业中兼顾以上问题, 有必要对固体火箭发动机水射流清理工艺进行多目标优化设计。
对于通过多目标优化清理工艺参数来兼顾固体火箭发动机水射流清理作业“安全性、高效性、环保性”的研究工作, 目前尚未见到相关的文献报道。
本研究在分析水射流清理工艺所面临问题、进行端羟基聚丁二烯(HTPB)推进剂方坯水射流清理实验和废水收集实验的基础上, 以水射流清理作业中推进剂方坯质量损失速率、废水产生速率为目标, 以水射流清理作业各工艺参数的取值限制为约束, 融合使用拉丁超立方抽样方法[6]、BP神经网络[7]、代理模型技术和非支配排序遗传算法(NSGA-Ⅱ)[8-10], 建立固体火箭发动机水射流清理工艺主要参数的多目标优化设计方法, 以求得Pareto优化解集, 进而得到水射流清理作业的最优工艺条件。
2 水射流清理工艺的多目标优化过程 2.1 水射流清理工艺的多目标优化流程图 1为固体火箭发动机水射流清理工艺的多目标优化流程, 主要分为三个步骤: (1)根据清理工艺优化中存在的矛盾提出多目标优化表达式; (2)分别建立各个目标的代理计算模型; (3)使用NSGA-Ⅱ进行多目标优化求解。

|
图 1 水射流清理工艺多目标优化流程图 Fig.1 Flow chart of multi-objective optimization for waterjet cleaning process |
水射流清理工艺优化中“安全性、高效性、环保性”之间存在有一定的矛盾和冲突, 这使得单纯优化水射流清理工艺的清理效率或废水产生速率并不具有实际的指导意义。只有对水射流清理工艺参数进行多目标优化, 才能使水射流清理作业契合安全、高效、环保的整体要求。
水射流清理工艺优化中所存在的矛盾和局限可以简单描述为:必须在清理安全性所允许的工艺参数取值区间内, 使推进剂质量损失速率和废水产生速率达到最佳匹配。因此, 可提出水射流清理工艺多目标优化问题的表达式为
| $ \left. \begin{array}{l} \min \;\;1/m\left( {{p_{\rm{W}}},{D_{\rm{T}}},{d_{\rm{N}}},{t_{\rm{C}}}} \right),\;L\left( {{p_{\rm{W}}},{d_{\rm{N}}}} \right)\\ {\rm{s}}.{\rm{t}}.\;\;\;50\;{\rm{MPa}} \le {p_{\rm{W}}} \le 90\;{\rm{MPa}}\\ \;\;\;\;\;\;\;\;\;20\;{\rm{mm}} \le {D_{\rm{T}}} \le {\rm{40}}\;{\rm{mm}}\\ \;\;\;\;\;\;\;\;\;0.15\;{\rm{mm}} \le {d_{\rm{N}}} \le {\rm{0}}{\rm{.3}}\;{\rm{mm}}\\ \;\;\;\;\;\;\;\;\;5\;\min \le {t_{\rm{C}}} \le 15\;\min \end{array} \right\} $ | (1) |
式中, pW为水射流压力, MPa; DT为靶距, mm; dN为喷嘴直径, mm; tC为清理时间, min; m(pW, DT, dN, tC)为推进剂质量损失速率, g·min-1; L(pW, dN)为废水产生速率, mL·min-1。
需要说明的是, 式(1)中pW、DT、dN、tC的约束条件是依据HTPB推进剂清理作业的安全需求[2-3]和本实验所用清理设备的实际情况确定的。对于不同种类、配方的推进剂和不同参数的清理设备, 应适当调整pW、DT、dN、tC的约束条件。
2.3 质量损失速率的代理计算模型由于目前对高压水射流清理HTPB推进剂过程进行有限元分析的计算成本巨大、计算耗时极长, 且仿真结果与实际情况很难吻合, 因而本研究不考虑水射流冲击破碎的具体物理过程, 而是使用BP神经网络基于一定的清理实验数据来模拟水射流压力、靶距、喷嘴直径、单次清理时间与推进剂质量损失速率之间的复杂非线性关系, 并以此BP神经网络模型作为推进剂质量损失速率的代理计算模型。
在BP网络模型的建立过程中, 实验数据在样本空间中的分布对其模拟计算精度有很大影响[7]。为了在较少实验样本点下获得较高计算精度的BP神经网络模型, 本研究采用拉丁超立方抽样方法[6]来确定实验样本点。作为一种多维分层抽样方法, 拉丁超立方抽样采用等概率随机正交的原则, 将每个设计变量的设计区间都等概率分为N个小区间, 再从各个设计变量的N个小区间内随机且不重复地组合出N个样本, 这样可以使得到的N个样本点非常均匀地分布在样本空间中。图 2为2设计变量4样本点时的拉丁超立方抽样示意图。由于喷嘴直径仅有几个固定的尺寸, 因此本研究仅对水射流压力、靶距、单次清理时间3个设计变量采用拉丁超立方抽样得到30个样本点, 各个样本点中对应的喷嘴直径从0.15, 0.20, 0.25, 0.30 mm四个数值中随机选取。另外, 随机抽取6个样本点作为验证样本使用。

|
图 2 拉丁超立方抽样示意图(2设计变量4样本点) Fig.2 The schematic diagram of Latin Hypercube Sampling |
使用自研的高压水射流清理系统(其数控切割平台如图 3所示)在前面确定的36个样本点条件下开展水射流清理实验, 清理的HTPB推进剂方坯尺寸为15 cm×15 cm×15 cm, 参照《QJ 1113-1987复合固体推进剂性能测试用试样》制得。清理前后分别对HTPB推进剂方坯进行称重, HTPB推进剂方坯在水射流清理后的质量损失除以清理时间即为该清理实验条件下HTPB推进剂方坯的质量损失速率。

|
图 3 数控切割平台的组成与结构 1—切割室, 2—喷头, 3—高压水管, 4—推进剂, 5—工件台, 6—X向传动, 7—Z向传动, 8—双层滤网, 9—收集室, 10—传动室, 11—吸附系统 Fig.3 Composition and structure of computer numerical control cutting platform 1—cutting room, 2—nozzle, 3—high pressure water pipes, 4—propellant, 5—stage, 6—X-drive, 7—Z-drive, 8—double-layer filter, 9—gathering room, 10—transmission room, 11—adsorption systems |
以拉丁超立方抽样得到的30组样本点的清理实验数据为训练样本, 其中的水射流压力、喷嘴直径、靶距、单次清理时间作为训练输入, 对应的HTPB推进剂方坯质量损失速率作为训练输出, 设置BP神经网络的拓扑结构为3层(各层神经元个数为4-10-1), 激活函数为tansig、purelin, 误差函数为模拟输出与理想输出之间的均方误差, 学习算法为加入动量项且有自适应学习速率的梯度下降法, 动量系数、学习速率初始值、增长比、下降比、表现函数增加最大比分别为0.9、0.05、1.05、0.7、1.04, 训练要求精度、最大训练次数分别设为0.001、5000。
使用训练好的BP神经网络来计算30组训练样本和6组验证样本实验条件下的HTPB推进剂方坯质量损失速率值, 并将计算值与实验值进行对比, 如图 4所示。

|
图 4 质量损失速率实验值与计算值的对比 Fig.4 Comparison of massloss-speed between tested data and calculated data |
图 4可以直接呈现出这36组质量损失速率数据的计算误差分布, 其中相对误差在±5%以内的有35组, 占97.2%;相对误差超出±5%的仅有1组, 占2.8%;所有样本的最大相对误差未超过±6.3%; 6组验证样本的质量损失速率数据的相对误差均未超出±4%。由此可见, BP神经网络模型具有较高的计算精度, 可以用作质量损失速率的代理计算模型。
2.4 废水产生速率的理论计算模型由于高氯酸铵(ammonium perchlorate, AP)在当前应用的固体推进剂组成中占据相当大的比重(20%~70%), 而AP又易溶于水(25 ℃时溶解度为20 g), 因此在高压水射流清理固体推进剂过程中会不可避免地产生AP废水。AP废水中的高氯酸根离子具有高稳定性、高水溶性、高流动扩散性和低吸附性的特点, 能够在水环境中长期稳定存在, 并随水的流动而快速扩散。已有研究表明[4], 进入水体环境中的高氯酸根离子在很低的浓度水平下即可直接或间接地危及各种动植物、微生物的生长发育, 造成环境污染、破坏生态平衡, 因而美国国家环境保护局(Environment Protection Agency, EPA)曾于2002年的毒理学报告中推荐将1 ng·mL-1作为饮用水中高氯酸根离子的限量浓度[11]。然而, 目前尚无成熟的高氯酸根降解技术能够在工程应用层面以较低成本、较快速度将AP废水中的高氯酸根离子浓度水平降低到安全区间, 因此, 限制水射流清理工艺中的废水产生速率具有重要意义。
固体火箭发动机水射流清理工艺中, 除去渗漏到推进剂废药、清理设备中和蒸发到空气中的很少部分, 高压水流的绝大部分水介质都会被收集到废水池中。另外, 当射流压力在100 MPa以内时, 水的体积压缩量小于4%[12]。因此, 不考虑清理时水的渗漏、蒸发和高压下水的压缩性(实际上这两者之间能够部分抵消), 可以将高压水射流的流量速率作为清理作业中的废水产生速率。
在高压水射流喷嘴出口截面内外两点之间联立伯努利方程和质量守恒方程, 可以得到水射流速度的简化表达式[12]:
| $ {v_{\rm{w}}} = 44.7 \times \sqrt {{p_{\rm{O}}}} $ | (2) |
式中, vw为水射流速度, m·s-1; pO为水射流出口压力,MPa。
对于本文所使用高压发生系统产生的水射流,经实验研究,其出口压力与射流压力的经验关系式为:
| $ {p_{\rm{O}}} \approx \left( { - 0.1127d_{\rm{N}}^2 + 0.6639{d_{\rm{N}}} + 0.1418} \right){p_{\rm{W}}} $ | (3) |
联立式(2)、式(3),进而可由射流流量计算公式得到高压水射流的流量速率, 本研究将之等同于清理作业中的废水产生速率:
| $ \begin{array}{l} L\left( {{p_{\rm{W}}},{d_{\rm{N}}}} \right) = 60 \times 44.7 \times \sqrt {\left( { - 0.1127d_{\rm{N}}^2 + 0.6639{d_{\rm{N}}} + 0.1418} \right){p_{\rm{W}}}} \times \\ \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;{\rm{ \mathsf{ π} }} \times {\left( {{d_{\rm{N}}} \div 2} \right)^2} \end{array} $ | (4) |
选取四组实验条件, 收集清理过程中产生的废水并称重, 将相同条件下实验测定的废水产生速率与根据式(4)得到的计算值进行对比, 见表 1。结果显示, 废水产生速率计算值大于实验测试值, 但相对误差不会超过10%, 故可将水射流流量速率计算公式用作废水产生速率计算公式。
| 表 1 废水产生速率实验值与计算值的对比 Tab.1 Comparison of wastewater generation rate between tested data and calculated data |
在多目标优化问题中, 各个目标之间存在有一定的矛盾、制约关系, 即某一目标的改善一般是以其他目标的损失作为代价的, 不存在能够使每个目标都达到最优的解, 因此多目标优化问题的解通常是一个非劣解, 也称作Pareto解。Pareto解并不唯一, 由Pareto解构成的集合称为Pareto解集。非支配排序遗传算法NSGA-Ⅱ[8-10]是迄今为止最为优秀的进化多目标优化算法之一, 它采用分级的非支配排序方法, 并引入精英保留策略和排挤机制, 使得算法的计算复杂度较小, 确保最优解集能够尽可能均匀分散在整个Pareto解集前沿面(Pareto front)上。
针对固体火箭发动机清理工艺多目标优化问题, 本研究采用非支配排序遗传算法NSGA-Ⅱ, 以(10000/m(pW, DT, dN, tC), L(pW, dN))为目标函数, 采用式(1)中的约束条件, 对pW、DT、dN、tC四个变量进行实数编码, 设置交叉概率、交叉分布指数、变异概率、变异分布指数分别为0.8、20、0.2、20, 精英保留个数为6, 种群大小为60, 最大进化迭代次数为500, 种群目标值平均变化的最大停滞代数为50。
当迭代次数到达262次时, Pareto解集对应目标值的平均变化停滞代数超出设置, NSGA-Ⅱ程序计算停止。图 5所示为NSGA-Ⅱ程序计算停止时种群内个体目标值在[100, 2300]内的分布, 从中可见, 已有相当多的个体的目标值集中在取值区间的低端。

|
图 5 NSGA-Ⅱ程序计算停止时种群内个体目标值分布 Fig.5 Target value distribution of individuals within the population after NSGA-Ⅱ calculation |
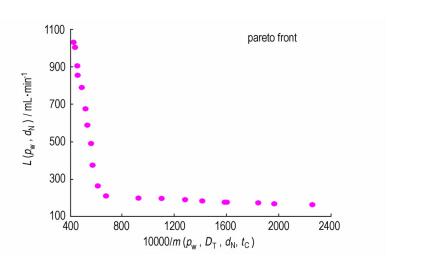
图 6所示为NSGA-Ⅱ优化求解得到的Pareto front。对于目标数为两个的优化问题而言, 其最优解集分布在搜索区域的边界线上。从图 6可以看出, 在NSGA-Ⅱ优化求解得到的Pareto front上, 各个解的分布比较均匀, 这从侧面说明了NSGA-Ⅱ用于固体火箭发动机水射流清理工艺多目标优化的有效性。

|
图 6 NSGA-Ⅱ优化求解得到的Pareto front Fig.6 Pareto front obtained by NSGA-Ⅱ calculation |
表 2所示为Pareto front上各个优化解所对应的清理工艺参数和目标值(按照废水产生速率从高到低的顺序排列)。
| 表 2 Pareto front上的优化解集 Tab.2 The optimization solution set on the Pareto front |
分析表 2中的数据, 可见:
(1) 当推进剂质量损失速率(或废水产生速率)基本保持在同一水平时, 通过调节水射流清理工艺参数可以使得废水产生速率(或推进剂质量损失速率)得到很大幅度的降低(或提高)。比较第6组数据和第9组数据, 当m值从19.36 g·min-1下降到17.54 g·min-1时(降幅仅为9.40%), L值从675.65 mL·min-1下降到375.66 mL·min-1(降幅达到44.40%); 比较第19组数据和第15组数据, 当L值从169.29 mL·min-1上升到183.91 mL·min-1 (升幅仅为8.63%)时, m值从5.08 g·min-1上升到7.07 g·min-1(升幅达到34.31%)。这说明依据清理工艺多目标优化结果在一定条件下可以通过一个目标值的较小损失换得另一目标值的较大提升。
(2) 清理作业中, 可以在工艺参数允许范围内对推进剂质量损失速率和废水产生速率进行最佳匹配。最佳匹配的原则是既保证推进剂质量损失速率、废水产生速率都处于比较合适的水平, 同时又能确保单位质量损失所造成的废水产生量L/m能够处于较低水平。从表 2可以看出, 第10、11、12组工艺条件均能达到推进剂质量损失速率和废水产生速率的较好匹配, 尤其以第11组工艺条件为最佳, 其对应的推进剂质量损失速率m可达到14.86 g·min-1, 而废水产生速率L仅为211.75 mL·min-1, 单位质量损失所造成的废水产生量L/m仅为14.25 mL·g-1。
(3) Pareto front上的优化解集为水射流清理工艺设计提供了很多种可供挑选的方案, 工作人员可以根据清理作业需求加以选择。一般情况下, 对于危险性比较高的推进剂配方, 建议选用“较低压力、较远靶距、较大喷径、较短时间”的清理工艺方案; 对于安全性比较好的推进剂配方, 建议选用“较高压力、较近靶距、较小喷径、较长时间”的清理工艺方案。此外, 也可以根据不同情况下对于清理效率和废水排放量的要求侧重不同来选择合适的清理工艺方案。
4 结论以推进剂质量损失速率、废水产生速率为目标, 以射流压力、靶距、喷嘴直径、单次清理时间为变量并加以约束条件, 综合运用拉丁超立方抽样方法、BP神经网络、代理模型技术和非支配排序遗传算法NSGA-Ⅱ, 建立了固体火箭发动机水射流清理工艺的多目标优化设计方法。优化结果表明, Pareto优化解集可以给出能够使推进剂质量损失速率和废水产生速率达到最佳匹配的工艺条件, 并且可以为不同情况下的水射流清理工艺设计提供多种可选方案。对于某配方HTPB推进剂, 经多目标优化所得到的推进剂质量损失速率和废水产生速率的最佳匹配能够使其单位质量损失所造成的废水产生量仅为14.25 mL·g-1。
| [1] |
承文, 柳玉杰. 水射流技术在火箭发动机研制生产中的应用[J].
化学清洗, 1999, 15(5): 39-43, 50. CHENG Wen, LIU Yu-jie. Application of waterjet technology in the development and production of rocket engine[J]. Chemical Cleaning, 1999, 15(5): 39-43, 50. |
| [2] |
郁红陶, 张庆明, 何远航. 水射流清理固体推进剂的安全性[J].
弹箭与制导学报, 2012(4): 139-142. YU Hong-tao, ZHANG Qing-ming, HE Yuan-hang. Safety during waterjet removing solid propellant[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2012(4): 139-142. |
| [3] |
蒋大勇, 王煊军. 水射流出口压力对HTPB推进剂冲击安全性的影响[J].
火炸药学报, 2012, 35(4): 49-53. JIANG Da-yong, WANG Xuan-jun. Influence of water jet outlet pressure on impacting security of HTPB propellant[J]. Chinese Journal of Explosives & Propellants, 2012, 35(4): 49-53. |
| [4] |
蔡亚岐, 史亚利, 张萍, 等. 高氯酸盐的环境污染问题[J].
化学进展, 2006, 18(11): 1554-1564. CAI Ya-qi, SHI Ya-li, ZHANG Ping, et al. Perchlorate related environmental problems[J]. Progress in Chemistry, 2006, 18(11): 1554-1564. DOI:10.3321/j.issn:1005-281X.2006.11.018 |
| [5] |
朱左明, 王煊军, 韩启龙, 等. 高压水射流清理HTPB推进剂的废药废水组分含量分析[J].
化学推进剂与高分子材料, 2013, 11(2): 89-92. ZHU Zuo-ming, WANG Xuan-jun, HAN Qi-long, et al. Component content analysis of waste grains and waste water generated by high pressure water-jet cleaning HTPB propellant[J]. Chemical propellants & polymeric materials, 2013, 11(2): 89-92. |
| [6] |
Butler N A. Optimal and orthogonal Latin hypercube designs for computer experiments[J].
Biometrika, 2001, 88(3): 847-857. DOI:10.1093/biomet/88.3.847 |
| [7] |
Martin T, Hagan, Howard B.
Demuth and Mark Beale. Neural Network Design[M]. PWS Publishing Company, 1996: 197-255. |
| [8] |
Deb K, Pratap A, Agarwal S, et al. A fast and elitist multiobjective genetic algorithm: NSGA-Ⅱ[J].
IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. DOI:10.1109/4235.996017 |
| [9] |
公茂果, 焦李成, 杨咚咚, 等. 进化多目标优化算法研究[J].
软件学报, 2009, 20(2): 271-289. GONG Mao-guo, JIAO Li-cheng, YANG Dong-dong, et al. Research on evolutionary multi-objective optimization algorithms[J]. Journal of Software, 2009, 20(2): 271-289. |
| [10] |
覃俊, 康立山. 基于遗传算法求解多目标优化问题Pareto前沿[J].
计算机工程与应用, 2003, 39(23): 42-44. QIN Jun, KANG Li-shan. A novel genetic algorithm to solve the Pareto front of multi-objective optimization problem[J]. Computer engineering and applications, 2003, 39(23): 42-44. DOI:10.3321/j.issn:1002-8331.2003.23.014 |
| [11] |
Renner R. Perchlorate regulation faces further delay[J].
Environmental science & technology, 2003, 37(9): 166A-167A. |
| [12] |
薛胜雄.
高压水射流技术工程[M]. 合肥: 合肥工业大学出版社, 2006.
|
A multi-objective optimization method for waterjet cleaning process of solid rocket motor was established with propellant massloss rate and wastewater generation rate as the optimization objectives, and waterjet pressure, target distance, nozzle diameter and single cleaning time as the variables.